


凡本報(bào)記者署名文字、圖片,版權(quán)均屬新安晚報(bào)所有。任何媒體、網(wǎng)站或個(gè)人,未經(jīng)授權(quán)不得轉(zhuǎn)載、鏈接、轉(zhuǎn)貼或以其他方式復(fù)制發(fā)表;已授權(quán)的媒體、網(wǎng)站,在使用時(shí)必須注明 “來(lái)源:新安晚報(bào)或安徽網(wǎng)”,違者將依法追究法律責(zé)任。
新安晚報(bào) 安徽網(wǎng) 大皖新聞?dòng)? 3月21日,記者從合肥工業(yè)大學(xué)獲悉,近期,該校汽車與交通工程學(xué)院石琴教授團(tuán)隊(duì)在新能源汽車動(dòng)力學(xué)研究領(lǐng)域取得新進(jìn)展,相關(guān)研究成果"A Model Predictive Control Approach with Slip Ratio Estimation for Electric Motor Anti-lock Braking of Battery Electric Vehicle"在《IEEE Transactions on Industrial Electronics》(TIE)上發(fā)表(DOI: 10.1109/TIE.2021.3112966)。
新能源汽車有別于傳統(tǒng)燃油汽車,可以采用電動(dòng)機(jī)進(jìn)行回饋制動(dòng),回收整車制動(dòng)能量,提高能量使用效率,增加續(xù)駛里程。但是,在電動(dòng)機(jī)回饋制動(dòng)過(guò)程中存在兩個(gè)方面問(wèn)題:一是在低附路面,電動(dòng)機(jī)回饋轉(zhuǎn)矩過(guò)大會(huì)導(dǎo)致車輪抱死;二是電動(dòng)機(jī)轉(zhuǎn)矩響應(yīng)非常快(毫秒級(jí)),進(jìn)一步導(dǎo)致車輪抱死速度快。
該團(tuán)隊(duì)則嘗試以車輪滑移率為狀態(tài)變量,電動(dòng)機(jī)轉(zhuǎn)矩與地面制動(dòng)力的綜合等效轉(zhuǎn)矩為系統(tǒng)輸入,構(gòu)建新能源汽車整車制動(dòng)動(dòng)力學(xué)模型,開(kāi)展電動(dòng)機(jī)回饋制動(dòng)車輪防抱死整車穩(wěn)定性控制研究。
為了實(shí)現(xiàn)對(duì)車輪滑移率的精準(zhǔn)控制,該研究首次應(yīng)用PI觀測(cè)器對(duì)地面制動(dòng)力進(jìn)行實(shí)時(shí)計(jì)算,獲得地面利用附著系數(shù),根據(jù)車輪的狀態(tài),進(jìn)一步提取出地面最大附著系數(shù)。為了應(yīng)用地面附著系數(shù)進(jìn)行整車穩(wěn)定性控制,基于估計(jì)得到的地面附著系數(shù),石琴團(tuán)隊(duì)在汽車研究領(lǐng)域首次勾畫出地面理想滑移率曲線,并在研究過(guò)程中提出了一套完整的地面理想滑移率曲線構(gòu)建方法,如圖所示,該曲線不僅可以用于新能源汽車穩(wěn)定性控制,也為未來(lái)無(wú)人駕駛汽車智能化整車穩(wěn)定性控制的車輪滑移率找到了理論上的優(yōu)化邊界。
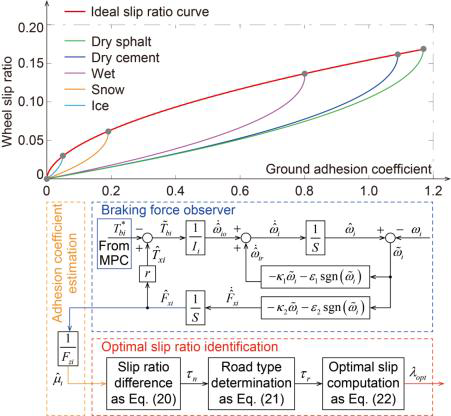
理想滑移率曲線及其構(gòu)建方法
該項(xiàng)研究得到了安徽省高校協(xié)同創(chuàng)新項(xiàng)目GXXT-2020-076,安徽省發(fā)改委新能源與智能網(wǎng)聯(lián)汽車創(chuàng)新工程項(xiàng)目等項(xiàng)目資助,該校博士生賀澤佳為第一作者,指導(dǎo)教師石琴教授為第二作者,賀林研究員為通訊作者。
據(jù)了解,近一年石琴教授團(tuán)隊(duì)在新能源汽車動(dòng)力學(xué)與控制方向的研究取得了一系列進(jìn)展,相關(guān)研究成果發(fā)表在《IEEE Transactions on Industrial Informatics》《IEEE/ASME Transactions on Mechatronics》《IEEE Transactions on Vehicular Technology》《Vehicle System Dynamics》《Science China Technological Sciences》等汽車研究領(lǐng)域著名期刊上,在學(xué)術(shù)研究領(lǐng)域?yàn)楹瞎ご筌囕v工程學(xué)科的建設(shè)與發(fā)展提供了有力支撐。
賀澤佳 新安晚報(bào) 安徽網(wǎng) 大皖新聞?dòng)浾?汪艷
編輯 陶娜




請(qǐng)輸入驗(yàn)證碼